Eric Chong
PHYS 4A--Physical Pendulum Lab
Lab Partners: Ben, Nina Song, and Joel Cook
Purpose: Derive expressions for the period of various physical pendulums. Verify your predicted periods by experiment.
Introduction: Objects with mass have a certain moment of inertia that depends on its radius and the place where the pivot is placed. This is essential to finding out the period for physical pendulums. Physical pendulums are rigid bodies mounted on a horizontal axis, so that it can freely oscillate back and forth. The moment of inertia dictates the tendency for the pendulum to move. If there is a higher moment of inertia, the object will have a larger moment of inertia, then the object will have a larger period. If the object has a smaller moment of inertia, then the object will have a smaller period. This is given through the equation alpha = -(mgr/I)theta. This equation is derived from the torque equation, and it will be explained how through the calculations shown in the pictures later, but we solve for the acceleration or angular acceleration because in simple harmonic motions, the acceleration can be used to solve for the period, since the coefficient next to the theta (or position) is the omega. If we take (mgr/I) as omega^2, then we can solve for just omega, and plug that omega into the equation for period, which is T=2pi/omega. This will help us solve for the period. And as expected, the inertia will affect the numerator of the period equation when we plug in omega, so that means that the higher the inertia the larger the period, or the lower the inertia the lower the period. Through this reasoning, calculation, and analysis, we can solve for the periods of the physical pendulums.
Procedure: First, professor had us do a prelab worksheet with questions about a half circle and a triangle, and the work can be seen here:


Generally, we first found the moment of inertia of an object pivoted at one end. And then we found the position of the center of mass and used the parallel axis theorem to find the moment of inertia of the object at the center of mass. After doing so, we can then use the parallel axis theorem again in order to find the moment of inertia of the object at another pivot. This is what we did for both the triangle and the half circle.
Upon doing the lab, we first measured the radius of the half circle, and the base and height of the triangle. With this, we can use those values to solve for the value of the moment of inertia, and then use that to calculate the value of omega, which can be used to solve for the period by dividing 2pi by omega. Here are our calculations with the measured values:
Half Circle:


(Note: the sin(theta) is approximated to a small angle, so we can treat it as just theta)
Triangle:

Our predicted values are 0.708 seconds for the half circle and 0.674 seconds for the triangle.
With these values, we wanted to test the prediction and oscillated the half circle and triangle. We set up LoggerPro and a motion sensor that can detect the period of the oscillation of objects. Here are the setup, graph, and data:
Half Circle:



Triangle:


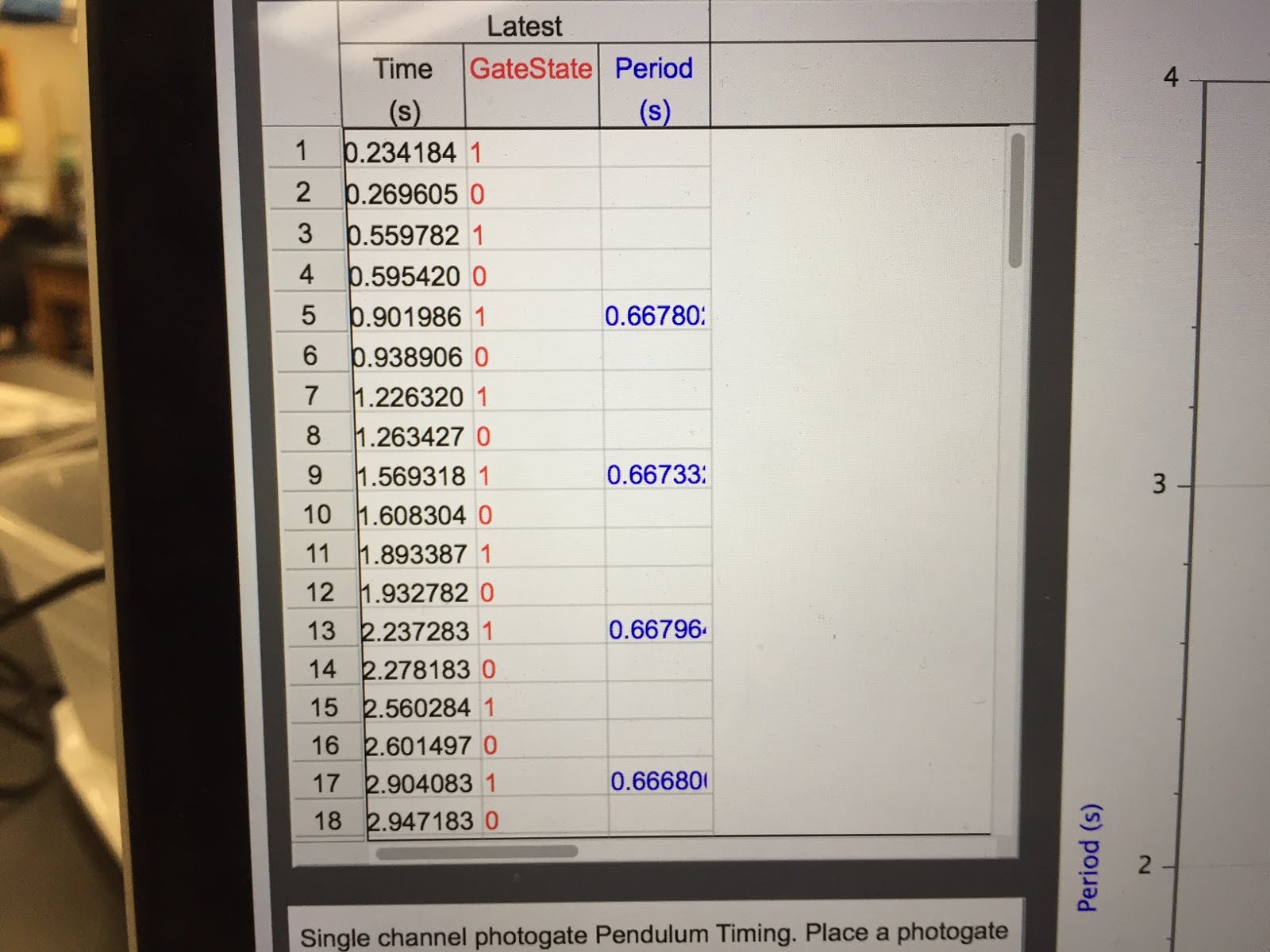
As expected, both periods were around 0.708 and 0.674 seconds for the half circle and triangle, respectively. This means that the calculations were correct, and that the small angle approximation is valid.
Conclusion: The experimental results are very close to what we derived. Based on the calculations, the period of the physical pendulum does not depend on the mass of the pendulum, so even if we added the mass of the paper clip it would not affect the period all that much. The masking tape, however, would be expected to have a bigger effect on the pendulum because the radius would be increased, and therefore increasing the moment of inertia. However, we combated this by making the masking tape relatively thin and small.
Overall, the lab is successful in showing how the moment of inertia of an object can be calculated, how the period can be calculated from solving for the acceleration and taking the omega and dividing 2pi by omega. We were able to set up the experiment and obtain data for the periods of both the half circle and triangle to a relatively small percent error. Some sources of uncertainty could come from the radius of the masking tape, the frictional torque from the pivot, and the dimensions of the half circle and the triangle, since they were not completely flat.
No comments:
Post a Comment